
Merhaba arkadaşlar,
Bu projemizde Android akıllı telefonumuzun Arduino ile Bluetooth Kontrollü Araç Yapımını Öğreneceğiz.
Gerekli malzemeler:
* Arduino UNO ( Klon Arduino olursa ch341ser.zip dosyasını bilgisayarınıza kurmanız gerekli)
* 2wd araç kiti
* L298N Voltaj Regülatörlü Çift Motor Sürücü Kartı
* HC06 veya HC05 Bluetooth Modülü
* 8 Tane Pil ve 8 Pil için Pil Yatağı Jumper Kablo
* Android İşletim Sistemine Sahip bir Telefon
MalzemeListesi


Telefonda Olması gereken Android Uygulama


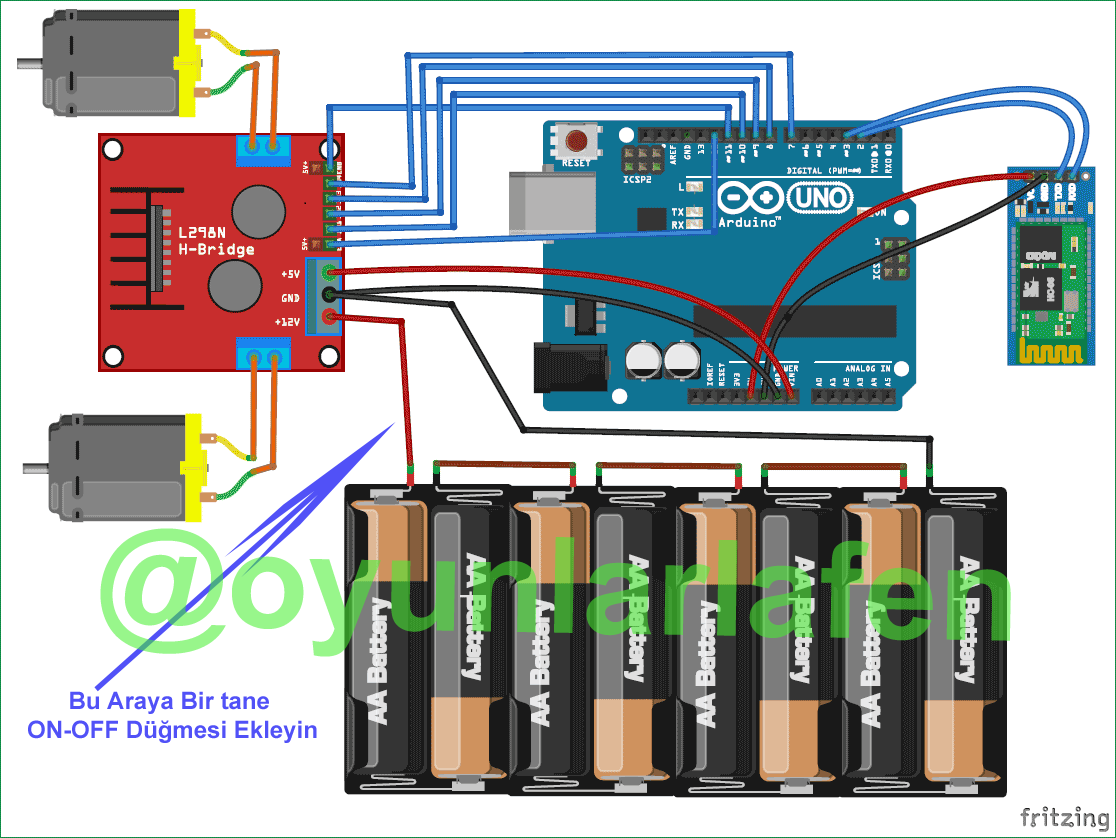
Elektronik Bağlantı Şeması

Arduino Kodları
#include <SoftwareSerial.h>
SoftwareSerial bt(2, 3); //rx, tx bacaklarının bağlı yeri belirtiyoruz nereye bağlanacağını
int solgeri = 6; // hangi pin hangi görev yaptığına batık. Bu pinler motorları hareket ettiriyor.
int solileri = 9;
int saggeri = 11;
int sagileri = 10;
char gelen = '0';
void setup() {
bt.begin(9600); // bt nin seri ekran kodu. bazı bt lerde 38400 bazılarında 9600 olur.
Serial.begin(9600); // Serial Ekrandan hangi tuşa basınca hangi harf çıktığı belli oluyor.
pinMode(sagileri, OUTPUT); // Çıkış pinleri olduğunu tanımladık
pinMode(saggeri, OUTPUT); // Çıkış pinleri olduğunu tanımladık
pinMode(solileri, OUTPUT); // Çıkış pinleri olduğunu tanımladık
pinMode(solgeri, OUTPUT); // Çıkış pinleri olduğunu tanımladık
}
void loop() {
if (bt.available()) {
gelen = bt.read();
Serial.println(gelen);
}
// ( solgeri, sağileri, solileri, sağgeri ) bu şekilde kodlar yazılacak.
// Araba sağ yada sol yapınca farklı şeyler yapıyorsa aşağıdaki sayıları düzenleyin.
// 140 sayısını ben ayarladım araba çok hızlı gitmesin diye siz 0 - 255 arasında istediğiniz sayıyı yazın.
// Ama 255 yazınca çok hızlı gittiği için tavsiye etmiyorum.
if (gelen == 'S') motor_sur(0, 0, 0, 0); // Dur
if (gelen == 'F') motor_sur(0, 140, 140, 0); // İleri
if (gelen == 'B') motor_sur(140, 0, 0, 140); // Geri
if (gelen == 'R') motor_sur(0, 0, 140, 140); // Sağ
if (gelen == 'L') motor_sur(140, 140, 0, 0); // Sol
if (gelen == 'I') motor_sur(0, 140, 100, 0); // Sağ İleri Çapraz
if (gelen == 'G') motor_sur(0, 100, 140, 0); // Sol İleri Çapraz
if (gelen == 'J') motor_sur(140, 0, 0, 100); // Sağ Geri Çapraz
if (gelen == 'H') motor_sur(100, 0, 0, 140); // Sol Geri Çapraz
}
void motor_sur(int soli, int sagi, int solg, int sagg) { // boyle bir fonksiyon tanımladık.
analogWrite(solileri, soli);
analogWrite(solgeri, solg);
analogWrite(sagileri, sagi);
analogWrite(saggeri, sagg);
}
// www.instagram.com/oyunlarlafen hesabına ait kodlardır. İnstagram hesabından sorularınızı sorabilirsiniz
// yada www.oyunlarlafen.com sayfasına yorum olarak yazabilirsiniz.
Yorum Yaparak yada www.instagram.com/oyunlarlafen hesabından bana ulaşabilirsiniz.
Arduino Kodlarını Dosya Halinde indirmek için Tıklayınız. Bluetooth_Araba

